Search Results
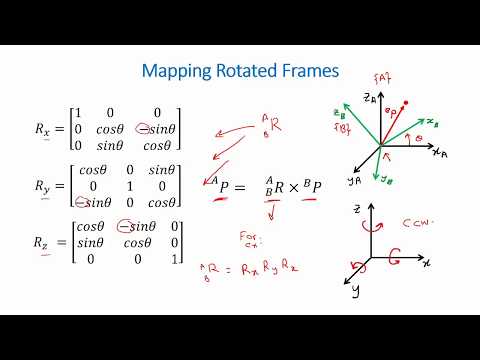
Rigid Body Transformations | Part 2 - Programming Robot Mechanics
ENAE788M: Class 2 Part 1: Rigid Body Transformations and Rotations
Modern Robotics, Chapter 8.2: Dynamics of a Single Rigid Body (Part 1 of 2)
Extending Newton Method | Inverse Kinematics - II | Part 10 - Programming Robot Mechanics
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
Modern Robotics, Chapters 2 and 3: Foundations of Robot Motion
LECT.8 | Translational & Rotational Numerical | Part 2 | ROBOTICS COMPLETE COURSE
Physical Modeling Tutorial, Part 6: Introduction to Multibody Simulation
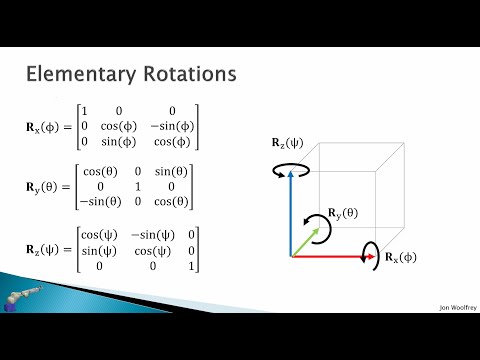
2.3 Rotations in 3D
Link Velocity - Theory
Dynamics with SymPy Mechanics; SciPy 2013 Presentation
Robot Kinematics - Part 2 - Transformations